TEINVEIN (TEcnologie INnovative per VEicoli INtelligenti) is a project financed by Regione Lombardia for the construction of a platform for intelligent autonomous vehicles.
ALMA (Ageing Without Losing Mobility and Autonomy) is a European project focused on supporting the autonomous mobility, navigation, and orientation of the mobility-impaired person (elderly and/or temporarily or permanently disabled person).
The ALMA system is a modular combination of advanced hardware and software technologies into an integrated and modular cost-effective system. AIRLab contributed to ALMA with its Personal Mobility Kit.
By analyzing the image from the onboard camera, the drone maintains the distance from the player, keeping it always in the image, and moving slightly left and right as to look for the best position to shot. When appropriate, it makes a sound with its propeller, simulating a laser shot, and the player has to parry it by putting the light saber in front of her/his chest.
The drone is intrinsically adapting to the style of movement of the player: a more active player will have to face a more active trainer.
Robots playing with people in physically interactive games exploit both the abilities requited to autonomous robots (such as mapping, perception, navigation, planning, …), but also those required to appear as effective players and good play companions, involving the players in challenging and satisfactory games, matching their ability.
We have developed many games gradually exploring different facets of the development of these games, from the perception and actuation abilities needed to play following the game rules, and guaranteeing the safety of the players, to timing in different aspects, to involvement and adaptation, either intrinsic or learned from playing, to the skill of the player.
Some of the developed games are listed here below.
Robots can be successfully applied with success with people with disabilities. Since years we are developing robots, also in collaboration wit care centers, which could be used for inclusive play . A web site dedicated to this activity is http://playbot4all.polimi.it.
Concierge is a robotic head intended to stay on the side of an office door and following with the “eyes” the persons passing in the corridor. When a person comes to the door Concierge makes a “Yes” or “No” gesture according to the possibility to disturb the person in the office. Concierge can be dressed in different ways, corresponding to different psychological types, expressing the same behavior in different flavors. The more appreciated is the funky one.
i.Drive is an interdepartmental laboratory where AIRLab is the technology provider for robotics.
The laboratory aims at developing inter-disciplinary proficiency required for analysis and modelling of behavioral aspects due to the interaction between driver, vehicle, infrastructure, and environment through:
A fixed structural component based on a virtual realty simulator aimed at the ex-ante test of expected behavioral models, the joined optimization of vehicle and road infrastructure, the increase of ex-post and in-itinere statistical significance ofexperiments carried out on roads;
A mobile component based on an instrumented vehicle aimed at measuring on field performance and reactions of drivers in different driving conditions and at collecting environmental data to be reproduced ex-post by simulation.
MADROB (Modular Active Door for RObot Benchmarking) and BEAST (Benchmark-Enabling Active Shopping Trolley) are benchmarks for autonomous robots aimed at measuring their capabilities and performance when dealing with devices that are common in human environments.
MADROB is focused on opening doors; BEAST considers the problem of pushing a shopping trolley. Both make use of a device with the same features of its real counterpart, fitted with sensors (to assess the actions of the robots on it: e.g., force applied to the handle of the door, precision in following a trajectory with the cart) and actuators (to introduce disturbances simulating real-world phenomena: e.g., wind pushing the door panel, stone under the trolley’s wheel).
Beyond the hardware and software, MADROB and BEAST also comprise procedures and performance metrics that enable objective evaluation of the performance of robots, as well as comparisons between different robots and between a robots and humans.
The PMK is an add-on for commercial electric wheelchairs that uses robotic technology to provide two new functionalities:
autonomous driving, where the user only has to select her goal and the PMK drives the wheelchair safely to destination;
assisted driving, where the user is in charge of driving and the PMK only intervenes to ensure safety (e.g., slowing down to avoid a collision with a child jumping in front of the wheelchair) or provide help in difficult maneuvers (e.g., while approaching doorways).
The PMK has been developed with the collaboration of disabled people. Its design and implementation are focused on the principle of shared autonomy: the robotic part of the wheelchair only intervenes when this actually makes the user feel more empowered by this intervention, augmenting the user’s autonomy and independence.
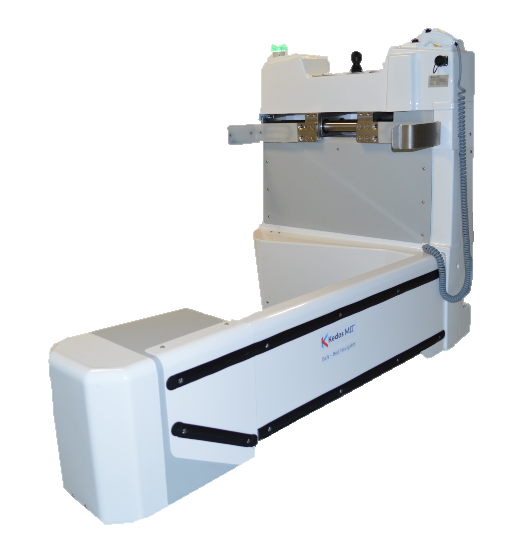
This is an example of collaboration between AIRLab and industry for the development of innovative products. In this case, the product is a device for the assisted transportation of hospital beds (with patients) employing robot technology for flexible movement in tight spaces and safety.
This project, a collaboration between AIRLab, Università di Milano – Bicocca and Info Solution SpA financed by Regione Lombardia, led to the development of international patents and a commercial product (BeN).